For the past month I have been measuring internet ping (ICMP ECHO) performance from my hilltop network. I do this with a script that runs every 30 minutes and measures the response time of http://www.google.com as reported by ping.
The script first pings http://www.google.com exactly once in an attempt to cache the DNS lookup (to avoid DNS time affecting the results). It then invokes the unix ping program with “-c 10” to do 10 pings. I throw out the highest and lowest result times and average the remaining 8. I record the results in a NumerousApp metric (of course).
The results are shown here:
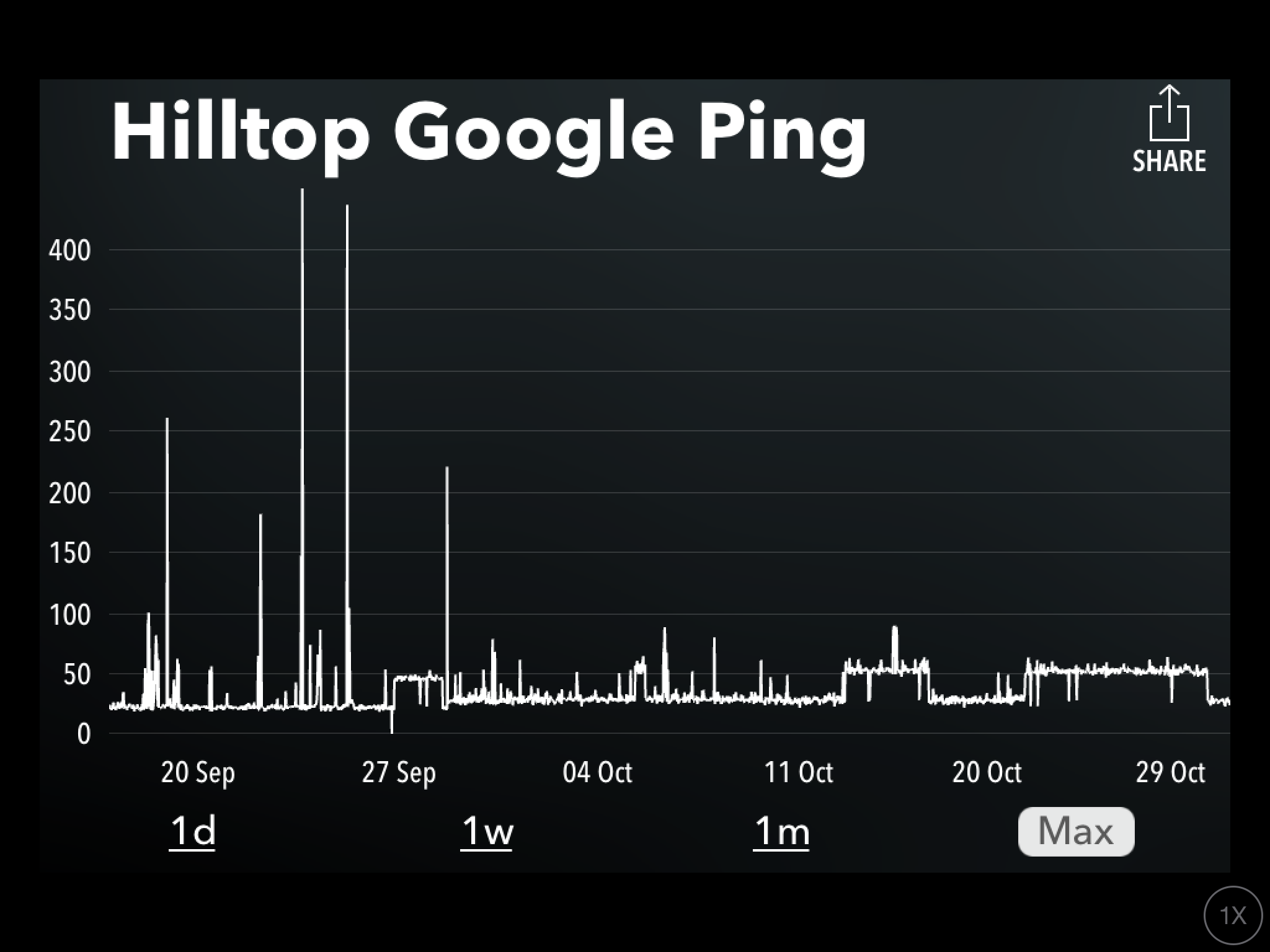
Raw data available in the numerous metric: Hilltop Google Ping
Ignore the occasional spikes when obviously some network disruption was causing consistently high ping times for that measurement (and there is one zero data point where a bug in the script caused a zero reading when the network was completely down).
What’s left is two different consistent readings – something in the low-mid 20msec response range and something averaging in the 50msec response range. It seems pretty apparent that there are two different routes between my hilltop network and http://www.google.com and for whatever reason sometimes I’m hooked up to the faster/shorter route and sometimes the longer one.
Here, for your amusement, is the heart of my “pinggoo” script:
ping -c 10 $TARGET |
grep from | grep 'time=' |
sed -e 's,.*time=,,' |
awk ' { print $1 } ' | sort -n | sed -e '1d' -e '$d' |
awk 'BEGIN {SUM=0; N=0} {SUM=SUM+$1; N=N+1} END {print SUM/( (N>0) ? N : 1)}'
Here’s what a typical output line from ping looks like on my mac:
64 bytes from 74.125.227.114: icmp_seq=0 ttl=53 time=22.388 ms
This is some truly fine shell hackery. It turns out the two grep statements are redundant (either one alone suffices) but I put them both in as a way to ensure I was really looking only at the successful ping lines (the ping program itself puts out a lot of other verbose output). Then the sed deletes everything prior to the ping time. The awk program print $1 separates out the time from the trailing “ms”. What we then have is (hopefully) a list of 10 numbers, one per line. I use sort to put them in numeric order, then sed to delete the first and last line (highest/lowest ping time) and then the final awk program to calculate the average.
I’m sure I could have done all this with a single pass of awk or a python program or something along those lines; however, one nice thing about this hackery is that it is fairly robust across ping variants; so far this has worked just fine on my mac and on Debian wheezy, even though the two ping programs have different output formats (but the essential “time=” part is similar enough on both to work unchanged with this script).
Here’s a traceroute I just did while I appear to be getting the faster performance:
1 pfsense.nw 1.379 ms 2 * * * 3 * * * 4 tge7-5.trswtx1202h.texas.rr.com 20.527 ms 5 tge0-12-0-14.ausxtxir02r.texas.rr.com 18.915 ms 6 agg22.hstqtxl301r.texas.rr.com 28.277 ms 7 107.14.19.94 24.099 ms 8 ae-0-0.cr0.dfw10.tbone.rr.com 27.132 ms 9 ae0.pr1.dfw10.tbone.rr.com 24.956 ms 10 207.86.210.125 21.302 ms 11 207.88.14.182.ptr.us.xo.net 25.221 ms 12 207.88.14.189.ptr.us.xo.net 24.043 ms 13 ip65-47-204-58.z204-47-65.customer.algx.net 27.043 ms 14 72.14.233.77 26.225 ms 15 64.233.174.137 25.225 ms 16 dfw06s32-in-f18.1e100.net 23.943 ms
I edited out a bunch of the output detail to make it fit on this page better. Sixteen hops to whichever google server is serving me. If we interpret the hostname at face value my google server (at this moment) is in DFW somewhere.
I’m on Time Warner cable and was recently upgraded to 100Mb performance. This (unsurprisingly) doesn’t seem to have had any material impact on the ping times (throughput and latency being somewhat independent).
I’ll report back if I get any other interesting traceroute data especially when I’m in the 50msec performance arena.

Leave a comment